





Bentornati su Marte!
Continuiamo a seguire le attività in cui è impegnato Curiosity nelle vicinanze del cratere Gale. Abbiamo anche qualche nuova immagine da Perseverance, il video di un suo recente prelievo (mal riuscito) e un interessante aggiornamento della NASA sullo stato di Ingenuity. Si parte!
Curiosity conclude le analisi di Ubajara
Nello scorso aggiornamento ci eravamo lasciati con la prima serie di analisi da parte dello strumento Sample Analysis at Mars (SAM) in corso. Più nel dettaglio, Curiosity ha eseguito l’Evolved Gas Analysis (EGA) riscaldano il materiale roccioso a centinaia di gradi e analizzando i gas emanati dal campione. I tecnici hanno atteso i risultati del test per valutare se procedere con il secondo step delle analisi permesse da SAM, ovvero la Gas Chromatography Mass Spectrometry (GCMS).
I risultati parziali di SAM sul campione Ubajara non hanno però impressionato il team scientifico. Infatti il piano di lavoro inviato al rover il 19 maggio ha previsto di non procedere con l’analisi GCMS, ma non è ancora stato impartito l’ordine di versare al suolo il resto del materiale ancora contenuto nella punta del trapano. Analisi aggiuntive con lo strumento CheMin sono previste nei Sol successivi.
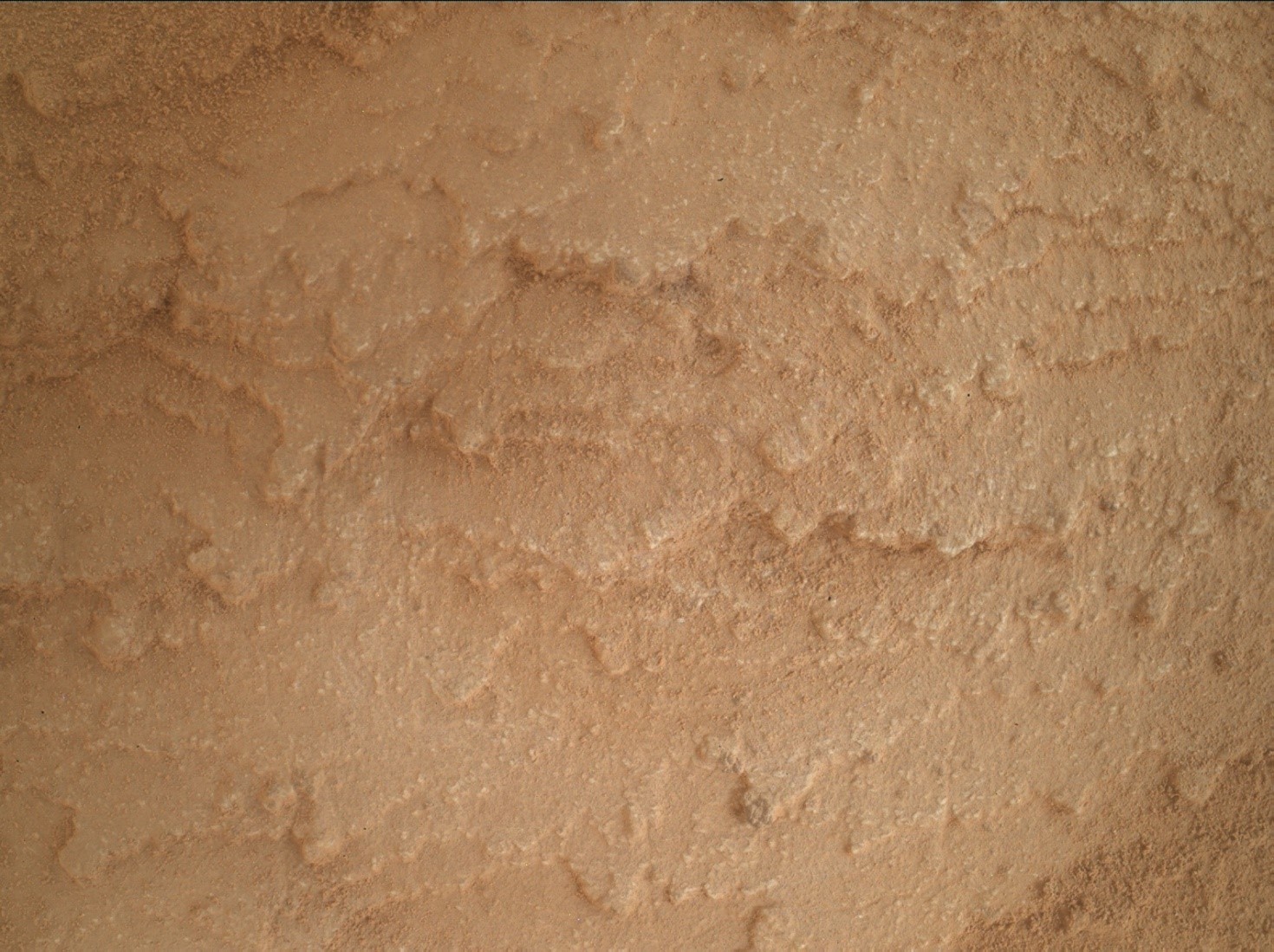
La campagna è stata conclusa eseguendo le ultime immagini del foro di estrazione.

La prosecuzione delle attività di Curiosity ha visto volgere le attenzioni, dalla medesima posizione, verso una nuova roccia. È stata battezzata Salamangone, con riferimento a una località brasiliana (come brasiliana è anche Ubajara). Qui il rover ha svolto un’attività di abrasione e indagini fotografiche ravvicinate con la camera MAHLI. Per la prima volta da parecchio tempo questa camera è stata usata anche in notturna sfruttando gli illuminatori a led posizionati attorno alla lente frontale.
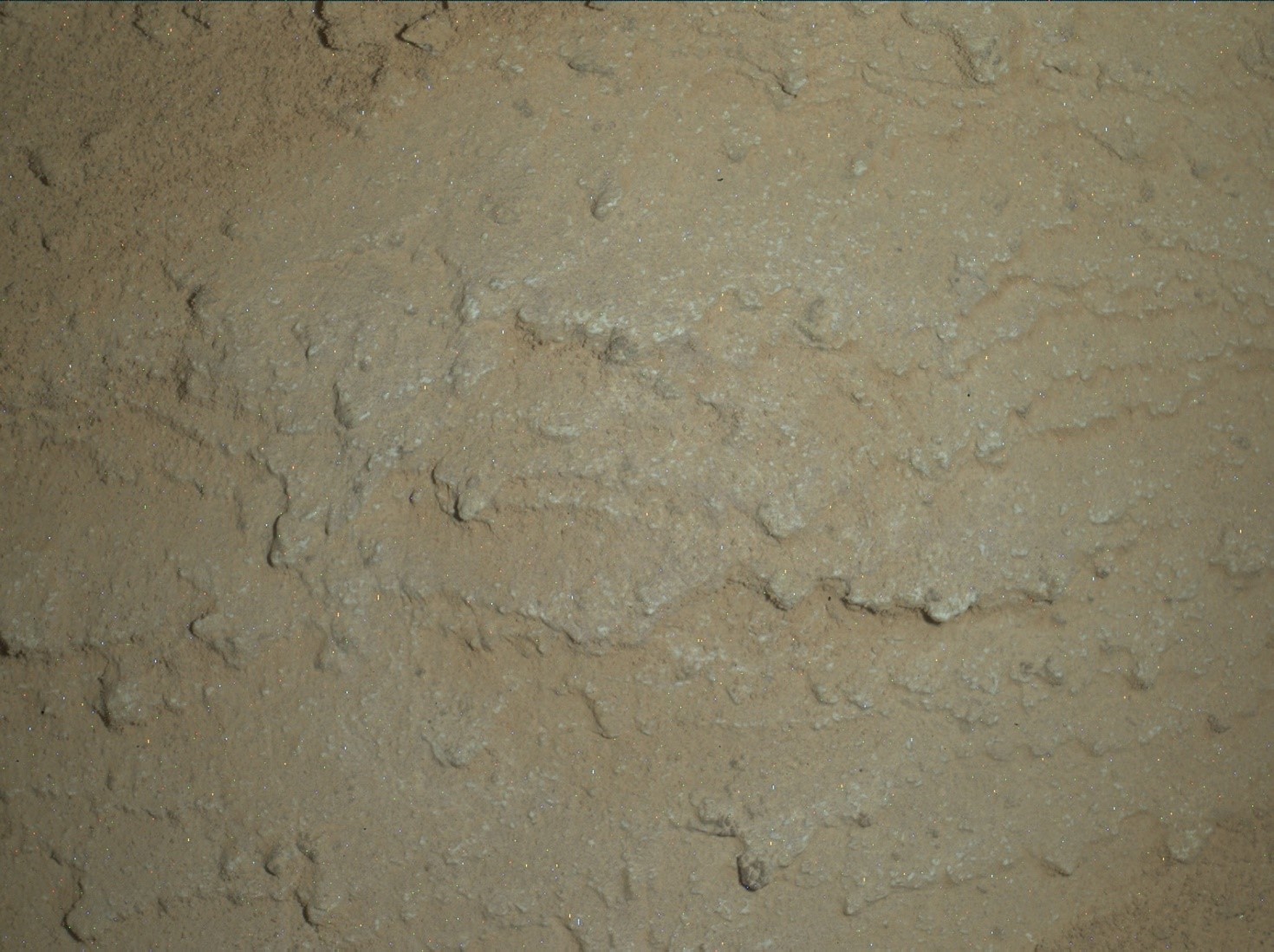
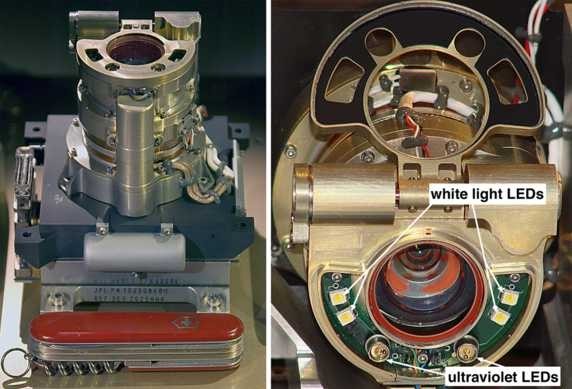
Immagini della camera MAHLI durante le fasi di assemblaggio.Lo scopo di fotografare un target in luce artificiale è quello di poter contare su un’illuminazione con spettro controllato, non filtrato dall’atmosfera a dai riflessi rossi da ogni direzione dell’ambiente marziano. MAHLI è dotato anche di una coppia di led a ultravioletti (365 nm) che permettono di individuare eventuali fluorescenze o fosforescenze delle rocce in risposta alla stimolazione a questa lunghezza d’onda.
Dopo tre settimane di permanenza nel sito di Ubajara, il Sol 3839 (25 maggio) è stato quello in cui Curiosity si è mosso: 37 metri di spostamento programmato su morbida, e pericolosa, sabbia marziana. Dalla nuova posizione il rover ha avviato la quarta analisi del campione Ubajara ed eseguito una serie di panoramiche della regione appena raggiunta.

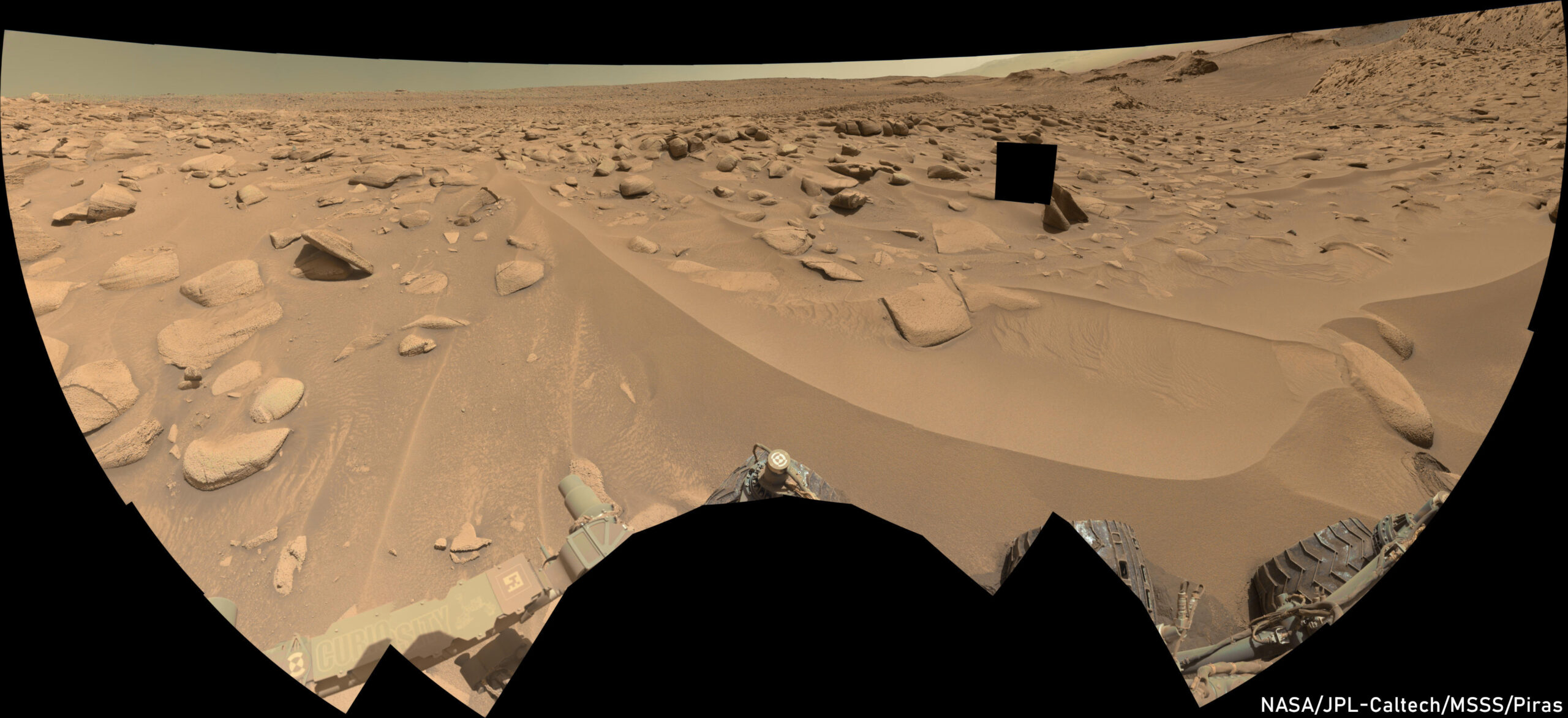
Il 29 maggio, con un ultimo spostamento nel tardo pomeriggio del Sol 3843 (a giudicare dalla cronologia delle immagini successivamente alla ripresa del panorama qui sopra), Curiosity copre circa altri 8.5 metri segnando così un nuovo record della sua missione: raggiunge i 30 km percorsi su Marte. Prima di lui solo un altro rover, Opportunity nel giugno 2011, aveva raggiunto questo traguardo. Il piccolo esploratore del programma MER, atterrato sul pianeta rosso nel 2004 insieme al gemello Spirit, detiene ancora il record di distanza percorsa su Marte con 45.16 km.

La posizione attualmente raggiunta da Curiosity è vicinissima alla precedente (soli 4 metri di distanza) ma i piloti del rover sono riusciti nel compito non facile di muoverlo su un terreno accidentato e sabbioso, e contemporaneamente porre tutte e sei le ruote su della solida roccia.
Questa condizione di stabilità agevolerà le prossime analisi per mezzo degli strumenti posti sul braccio robotico. Gli scienziati del Jet Propulsion Laboratory, l’istituto di ricerca che gestisce le operazioni dei rover marziani, hanno già messo nel mirino i target Cujubim, Cumbal, Cariacau, Crique Yolande, Crique Rubin, Paleomeu River… Non c’è sicuramente da annoiarsi!
Perseverance ancora vicino a Belva
Sono poche le novità documentate dalla NASA nelle attività del suo rover più potente, che sta perlopiù svolgendo attività con analisi fotografiche supportato dalle sue numerose camere. La posizione è ancora quella nelle immediate vicinanze del cratere da impatto Belva dove è giunto nel Sol 770 (20 aprile).

Rispetto ai precedenti aggiornamenti di questa rubrica, nel corso di alcuni Sol Perseverance ha eseguito un complicato giro attorno alla roccia bersaglio oggetto dell’abrasione Ozuel Falls (vedi News da Marte #16) forse per stabilizzare le sue ruote su un basamento più solido.

Nella ricostruzione degli spostamenti del rover una grossa mano è venuta, ora come già in passato, dall’eccellente sito Marslife.com. Grazie al processamento automatico dei metadati delle foto rileva la direzione verso cui ciascuna camera è orientata nel momento dello scatto, permettendo di collocare spazialmente ogni immagine dal punto di vista di Perseverance.
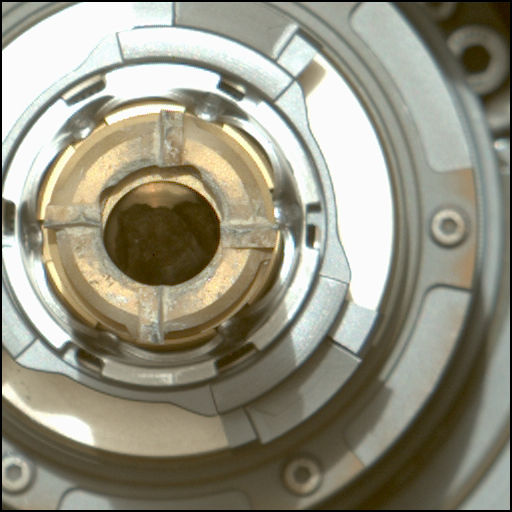
Tra le operazioni che ho scovato nelle immagini grezze c’è un prelievo di roccia che però non sembra sia andato a buon fine. Lo vediamo con i video realizzati nel Sol 802 da una delle Front HazCam. Complessivamente l’operazione è durata 16 minuti.

È possibile che già al momento del carotaggio i sensori del trapano abbiano restituito della telemetria inattesa, perché nel Sol successivo all’operazione i tecnici hanno immediatamente programmato una lunga serie di foto mirate a ispezionare l’interno della punta. Rilevando infatti grossi problemi nel campione che ambivano a raccogliere: il prelievo si rivela scarso ed estremamente friabile, con solo pochi frammenti che sono stati trattenuti.

È probabile che questo campione sarà scartato per tentare l’estrazione di uno migliore. Se però l’intera roccia di interesse dovesse presentare analoghe caratteristiche, potrebbe esserci un problema per il rover che si troverebbe nella condizione di non poter prelevare un carotaggio di adeguato volume.
Staremo a vedere e attenderemo degli aggiornamenti in merito per conto della NASA nei suoi usuali canali.
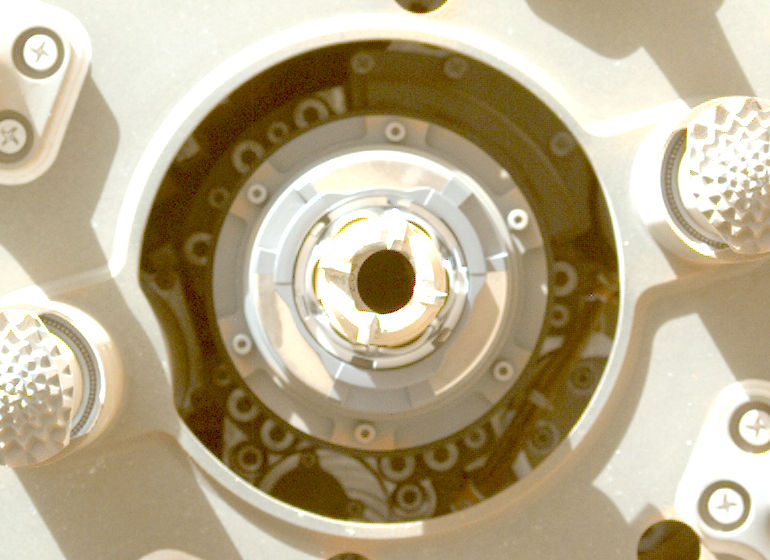
In chiusura di articolo, e dopo praticamente alcuni giorni di “silenzio fotografico”, rilevo che sono state rilasciate alcune nuove recentissime immagini scattate da Perseverance. Tra di esse una breve serie di osservazioni alla punta del trapano che dalle immagini correnti non è chiarissimo se al suo interno contenga ancora i frammenti rocciosi. Possiamo in ogni caso ipotizzare che un nuovo prelievo sia in vista, perché queste sessioni di ripresa sono frequentemente correlate alle operazioni con il trapano.
Ingenuity alle prese con l’altimetria del delta
Su queste pagine vi avevo raccontato mesi fa dei problemi di comunicazione tra Perseverance e l’elicottero Ingenuity (vedi https://www.coelum.com/news/news-da-marte-11).
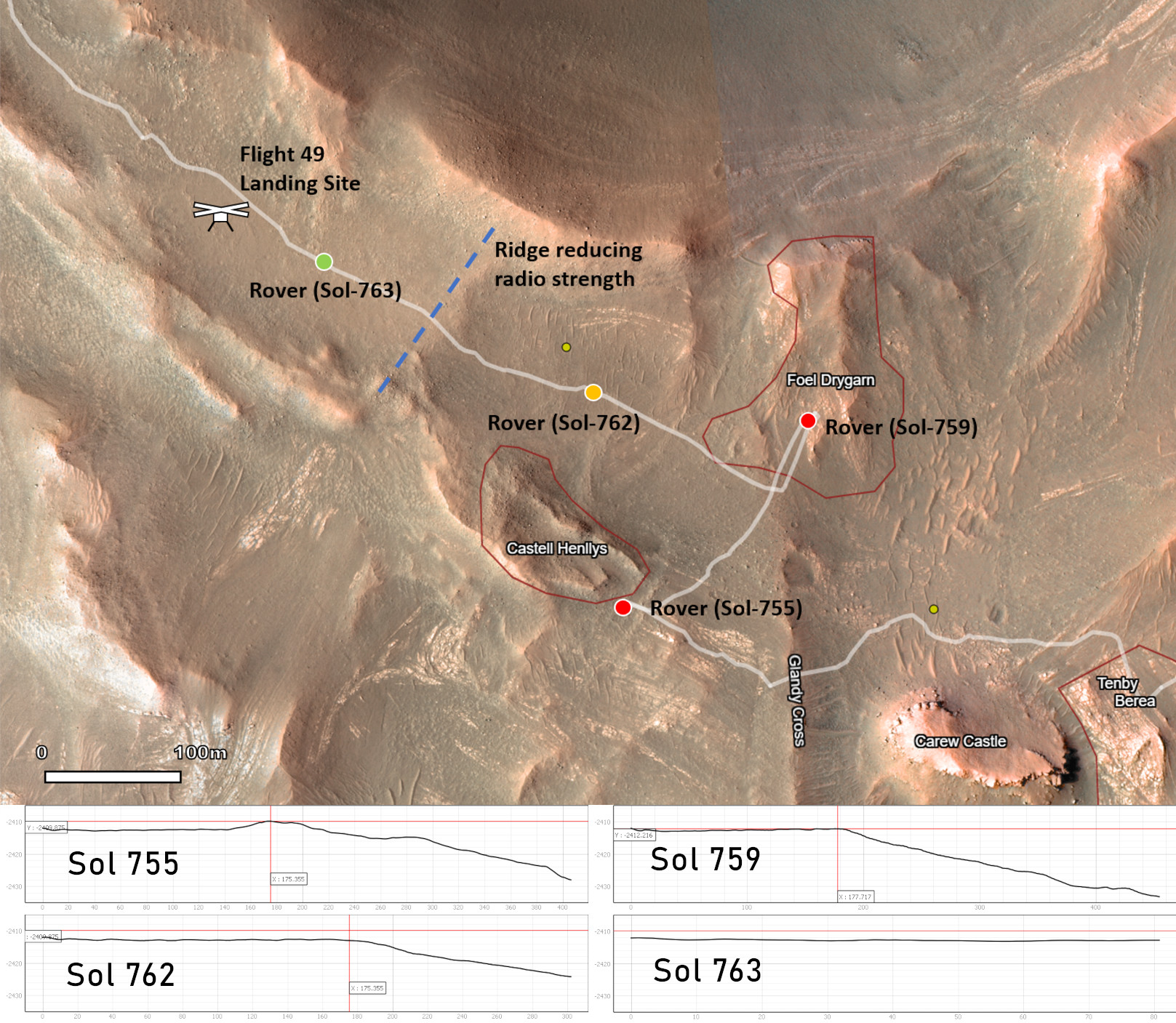
In una news scritta dall’ingegnere capo di Ingenuity Travis Brown viene raccontato di un più recente silenzio radio sperimentato dai team del JPL dopo il volo numero 49, compiuto ormai due mesi fa il 2 aprile nel Sol 752. La zona di atterraggio collocò l’elicottero in una sfortunata posizione da cui la line of sight verso la stazione radio del rover risultava bloccata dal bordo di alcuni rilievi.
Il team dell’elicottero era ansioso di caricare il piano per il volo 50, ma i problemi di comunicazione erano ulteriormente aggravati dai reset notturni di Ingenuity che richiedevano (e richiedono ancora) a Perseverance di restare in ascolto ogni mattina per i messaggi di risveglio dal suo compagno volante. La routine di lavoro prevede che i due prendano contatto e sincronizzino i timer di sistema, ma questa procedura risultava impossibile da eseguire.
La posizione di Perseverance all’ombra di Castell Henllys era certamente la peggiore per le comunicazioni, ma dopo lo spostamento verso Foel Drygam e il perdurare del silenzio di Ingenuity i team iniziarono a temere il peggio, ovvero che un inconveniente più grave e non risolvibile fosse capitato a Ingenuity. Neanche l’ampliamento della finestra mattutina di ascolto stava dando risultati, producendo quello che in oltre 700 Sol di lavoro congiunto si era tramutato nel primo blackout radio totale.
Come ben sapete Ingenuity ha ripreso contatto con Perseverance, ma questo è avvenuto solo nel Sol 761 con un piccolo pacchetto dati ricevuto alle 9:44 locali. L’indomani il team ha avuto l’effettiva conferma del buono stato di salute dell’elicotterino, la missione poteva continuare!
Appena possibile il piano del volo 50 è stato caricato, prima che il rover si avventurasse a meno di 45 metri da Ingenuity bloccando ogni tipo di attività dell’elicottero. Come abbiamo visto a metà aprile il nuovo spostamento si è svolto nel Sol 763 e ha spostato l’elicottero di 322 metri, mettendolo al sicuro dai temuti sorpassi da parte di Perseverance. Il sospiro di sollievo finale si è avuto la mattina successiva, con i dati di telemetria che hanno confermato il successo del volo e lo stato di salute di Ingenuity.
Attualmente distante 195 metri dal rover, l’elicottero è ancora in attesa del via libera per il volo 52 che è stato annunciato addirittura il 25 aprile.
Con riferimento al quesito di calcolo astrofotografico che ho posto nella News #16, ho preferito scrivere un articolo a parte raggiungibile a questo link.
Anche per questo aggiornamento marziano è tutto, grazie per la lettura e alla prossima.








")

